Global Positioning System
For digital maps to be useful, roads, lanes, and related objects such as street signs must be accurately geolocated on the earth. The Global Positioning System (GPS), and several other satellite positioning systems, achieve excellent accuracy while taking into account the irregular shape of the earth and the influence of gravity on the rate at which time passes. HERE makes extensive use of GPS for these reasons.
GPS uses a network of 24+ satellites in orbit and numerous receivers on or near the ground, such as in cars and aircraft. Each satellite knows its current position and time very accurately and transmits this information to receivers. The satellites achieve this accuracy by synchronizing their atomic clocks with each other and atomic clocks on the ground.
By measuring the time it takes for signals to travel from a satellite to a receiver on or near the ground, determining the distance between the two seems straightforward because the speed of radio waves is precisely known, and the distance is proportional to the time delay in the signal. Triangulating the location of the receiver in 3D space is accurate when using at least four different satellites: three for position and one to compensate for the error in the receiver's clock relative to the atomic clocks in the satellites. Then it's a simple matter of translating this location to useful coordinates such as latitude, longitude, and elevation relative to mean sea level.
In practice, this process is more complicated than it sounds. Einstein's General Theory of Relativity shows that time itself flows at different rates depending on the strength of the gravity field in different places. Hence, variations in gravity affect the time it takes for signals to travel from a satellite to a receiver on or near the ground, which in turn changes distance measurements: the gravity field on the surface of the earth is typically stronger than gravity in orbit because satellites in orbit are further from earth's center of mass. Also, the gravity near the surface varies slightly depending on the elevation of the receiver and the density of the earth (which isn't uniform) in proximity to the receiver.
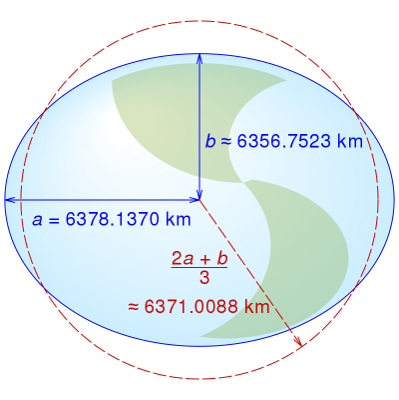
Further, the earth isn't a perfect sphere. Earth is a slightly irregular ellipsoid, sometimes called an "oblate spheroid" or "3D geoidal," in part because earth is mostly liquid magma and rotating -- a bit like a blob of hot jelly, covered with a thin crust, floating in space and spinning like a top. To be accurate, GPS must consider these irregularities in earth's shape, as well as the effects of localized gravity on the flow of time itself. For details on the irregular shape of the earth, see the next section.
3D geoid
Earth is a slightly irregular geoid, not a perfect sphere. Sometimes an ellipsoid shape is an adequate approximation, since the earth bulges out at the equator and has a major and minor axis, as opposed to a sphere that has the same radius everywhere.
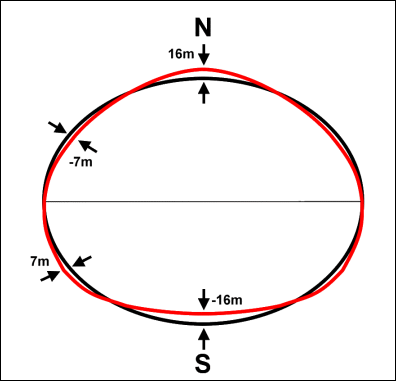
The geoid captures many of the irregularities in earth's shape, as the ellipsoid isn't exactly accurate by itself. In the following conceptual figure, the red curve illustrates the geoidal undulation of the earth's surface, relative to the black curve illustrating the ellipsoid.
Mathematical projection systems model earth's "geoidal" shape. A few projection systems are available. HERE map data uses the ECEF ITRF2014 projection system at epoch 2017.0. (ECEF stands for Earth-Centered, Earth-Fixed and ITRF stands for International Terrestrial Reference Frame.) Third parties that collect map data and submit it to HERE may use a different projection system. Without the use of a projection system, or consideration of Einsteinian irregularaties in spacetime, the positional error would be multiple kilometers.
Contributions from LiDAR and raster photos
LiDAR stands for "laser imaging, detection, and ranging." HERE vehicles collect LiDAR data as they drive along roads. It works by starting from a known location, such as a vehicle with a GPS receiver. Special lasers on that vehicle fire in specific directions. A receiver on that vehicle measures the time for the light that's reflected off nearby objects to return, which determines the distance between the vehicle and surrounding objects because the speed of light is precisely known. The result consists of geolocated 3D point clouds.
HERE uses LiDAR to identify and geolocate road furniture, such as barriers and poles, as well as localization objects like road signs. LiDAR also maps 3D building facades with point clouds, which processing can transform into 3D digital models, so HERE maps more closely resemble real places and support navigation with point-of-view cameras.
Example:

HERE vehicles also take photos as they drive on roads. Usually, HERE doesn't use these photos directly, but indirectly: developers, tools, and contributors use these photos to confirm things like the contents of sign faces and the textures of building facades.
