EVの経験的消費モデル
電気自動車 (EV) の経験的消費モデルでは、車固有のパラメーターを指定できます。このパラメーターは、特定のルート上で車のエネルギー消費量を計算するために使用されます。
このモデルを使用して、以下のような追加の制御項目をエネルギー消費量の計算に使用できます。
- 充電時間
- 充電レベル
- 充電スタンド
車両パラメーターに加えて、この経験的モデルは、一定速度での走行 (freeFlowSpeedTable) および交通量の多い状況下での走行 (trafficSpeedTable) 向けにユーザーが指定する消費速度表を利用します。
消費速度表
消費速度表とは、車両が勾配のない直線道路を特定の時速 (km/時) で走行する場合に、メートルあたりに消費されるエネルギー消費の割合を、車両ごとに異なる単位で定義するものです。
この表は区分的線形関数を表します。以下は、対応するリクエストオプションを持つ関数です。
ev[freeFlowSpeedTable]=10,0.130,20,0.132,30,0.136,40,0.142,50,0.151,60,0.161,70,0.176,80,0.194,90,0.214,100,0.237,110,0.264,120,0.290,130,0.321,140,0.354,150,0.389,160,0.426,170,0.466,180,0.509,190,0.554,200,0.601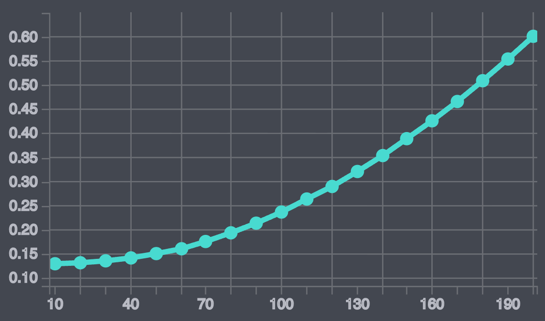
消費速度機能
次の2つの消費速度表を使用できます。
freeFlowSpeedTableは一定速度で走行した場合のエネルギーを表します。trafficSpeedTableは交通量の多い状況下で走行する場合、たとえば、車両が所定の平均速度で頻繁に走行速度を変えると予想される場合のエネルギー消費を表します。
リクエストにfreeFlowSpeedTableのみが含まれる場合、その表を使用して速度の変化に関連するエネルギー消費量が計算されます。
リクエストにfreeFlowSpeedTableとtrafficSpeedTableの両方が組まれる場合、次の式を使用して消費量が計算されます。
- :特定の道路の自由流速。交通状況関連の制約を一切考慮することなく推定される走行速度として定義されます。
- :特定の道路の平均走行速度。利用可能な交通情報を使用して走行速度を推定します。
- :それぞれ走行速度と自由流速の表です。
走行速度が自由流速と等しい場合、freeFlowSpeedTableのみを計算で使用してエネルギー消費を決定します。
自由流速と比べて走行速度が遅いほど、trafficSpeedTableの影響は大きくなります。
電気自動車の消費量の計算式
このモデルでは、セグメントに沿った消費 () は長さ、速度、標高の差によって異なります。
EVのリクエストとモデルのパラメーター
次のリクエストパラメーターは、消費量計算の消費モデルを定義します。
| リクエストパラメーター | モデルパラメーター | 必須 | 説明 |
|---|---|---|---|
ev[ascent] | 標高が1メートル上昇するごとに消費されるエネルギー量 (Wh)。 | ||
ev[descent] | 標高が1メートル下がるごとに回収されるエネルギー量 (Wh)。 | ||
ev[freeFlowSpeedTable] | はい | 平坦な道路における特定の自由流速における消費率を指定する関数曲線。 | |
ev[trafficSpeedTable] | 平坦な道路における交通状況下での特定の速度における消費率を指定する関数曲線。 | ||
ev[auxiliaryConsumption] | 走行1秒あたりに車両の補助システム (エアコン、ライトなど) によって消費されるエネルギー量 (Wh)。 |
EVの地図パラメーター
マップデータから次のパラメーターを取得して、消費量計算をサポートします。
| パラメーター | 説明 |
|---|---|
| セグメントの長さ (メートル)。 | |
| セグメントの終点と始点の間の標高差 (正の場合はメートル単位、それ以外の場合はゼロ)。 | |
| セグメントの終点と始点の間の標高差 (負の場合はメートル単位、それ以外の場合はゼロ)。 | |
| セグメントに沿った移動時間 (秒)。 |
関連コンテンツ
- セクションあたりの消費量を計算する
- [車両[speedCap]の使用方法](doc:speed-cap)
2 か月前の更新